PID控制算法
一、PID概要
1、引入
流量稳定、调整流量
2、适用系统
二阶以内的线性系统
线性系统:满足齐次性和叠加性
齐次性: 则
叠加性: 则
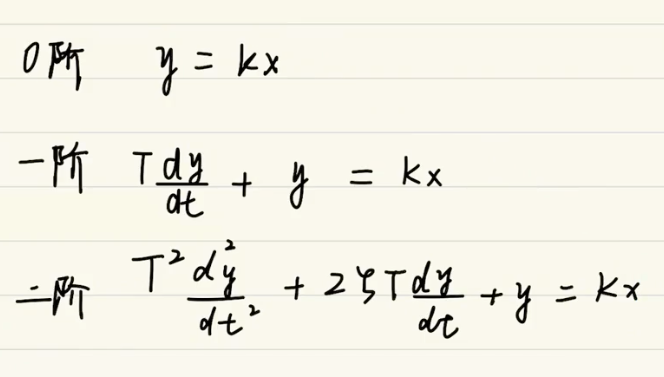
一阶系统:
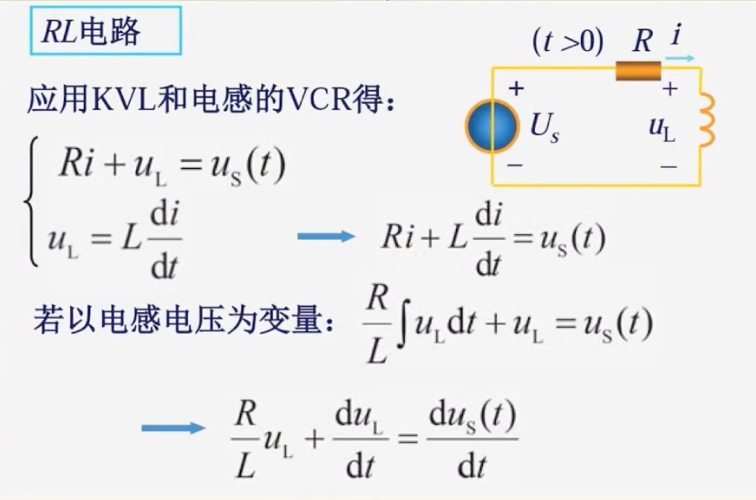
二阶系统:

3、宏观意义
简单、无需精确建模
二、PID基本知识
1、控制系统概述
1)开环控制系统
一般开环控制系统

前馈控制系统
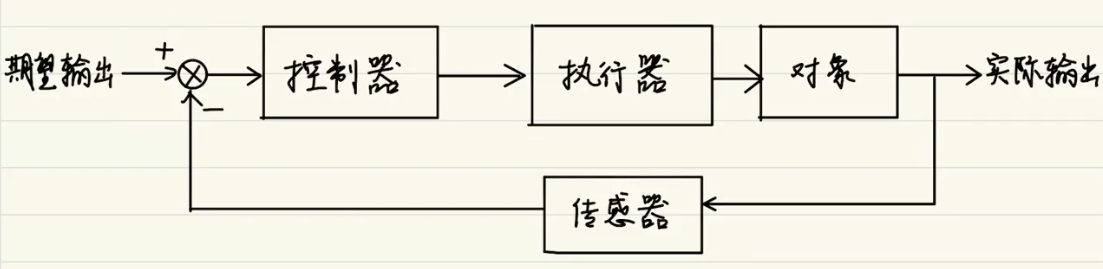
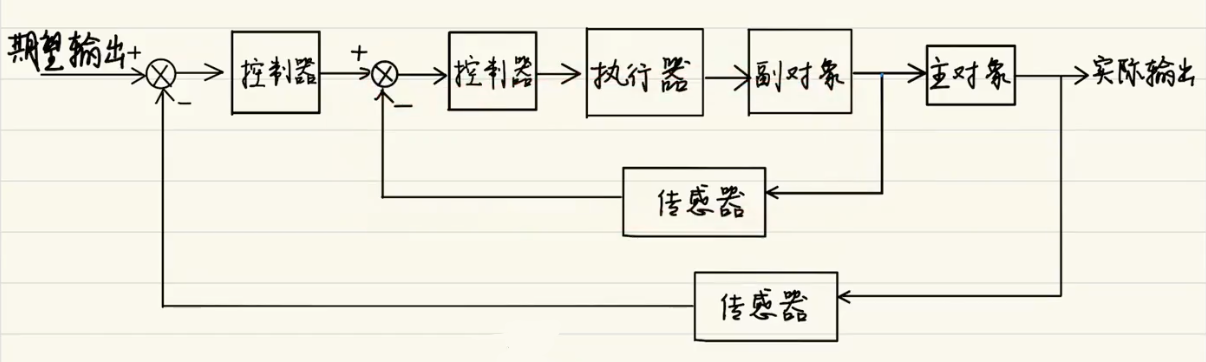
2)闭环控制系统
单闭环
双闭环
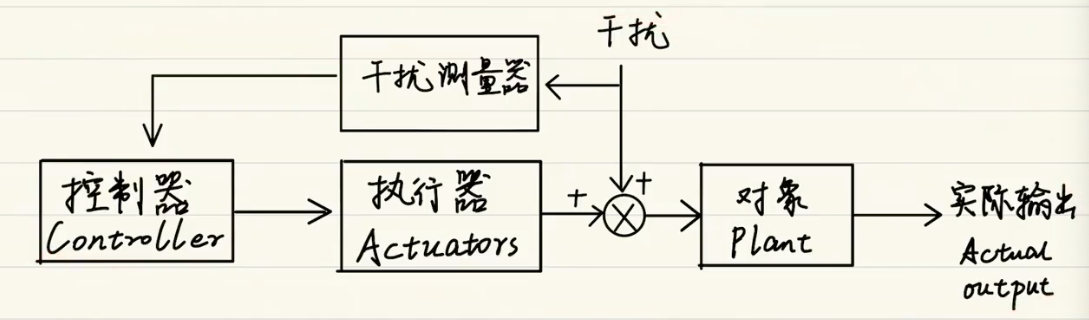
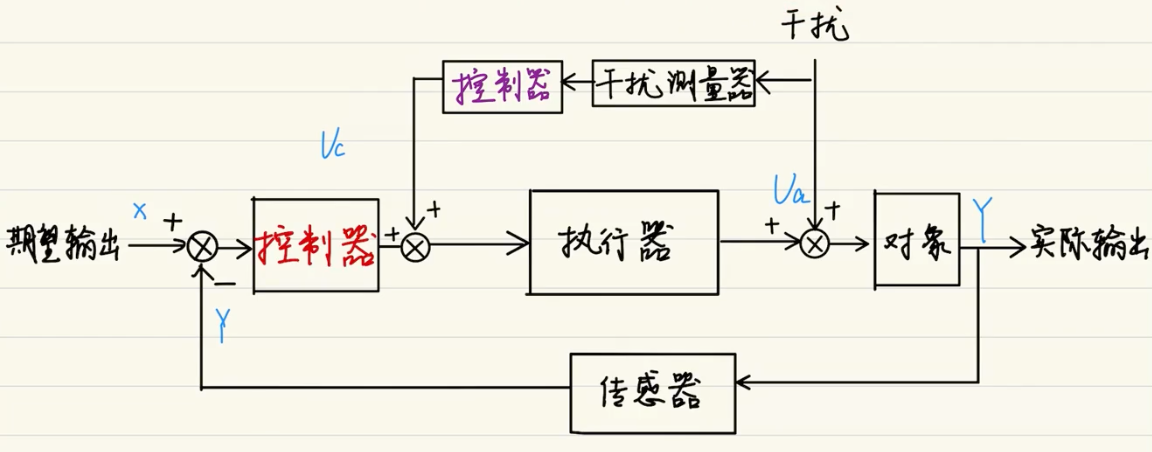
3)复合控制系统
前馈-反馈复合控制系统
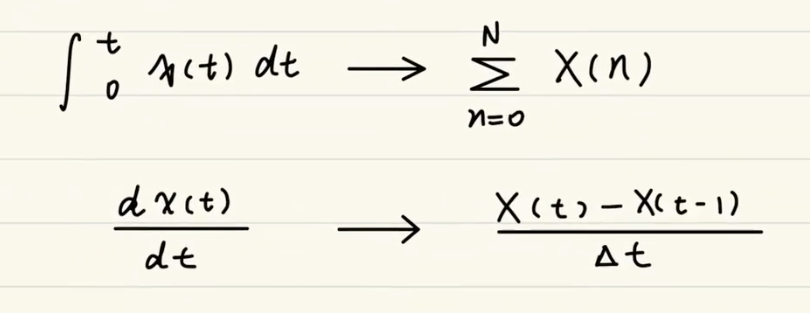
2、连续与离散信号
1)图形表示

2)信号算式表示
三、PID公式
1、抽象解释

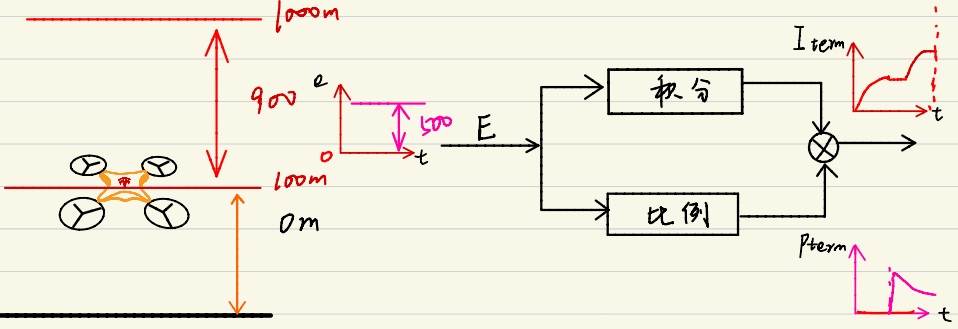
2、形象解释
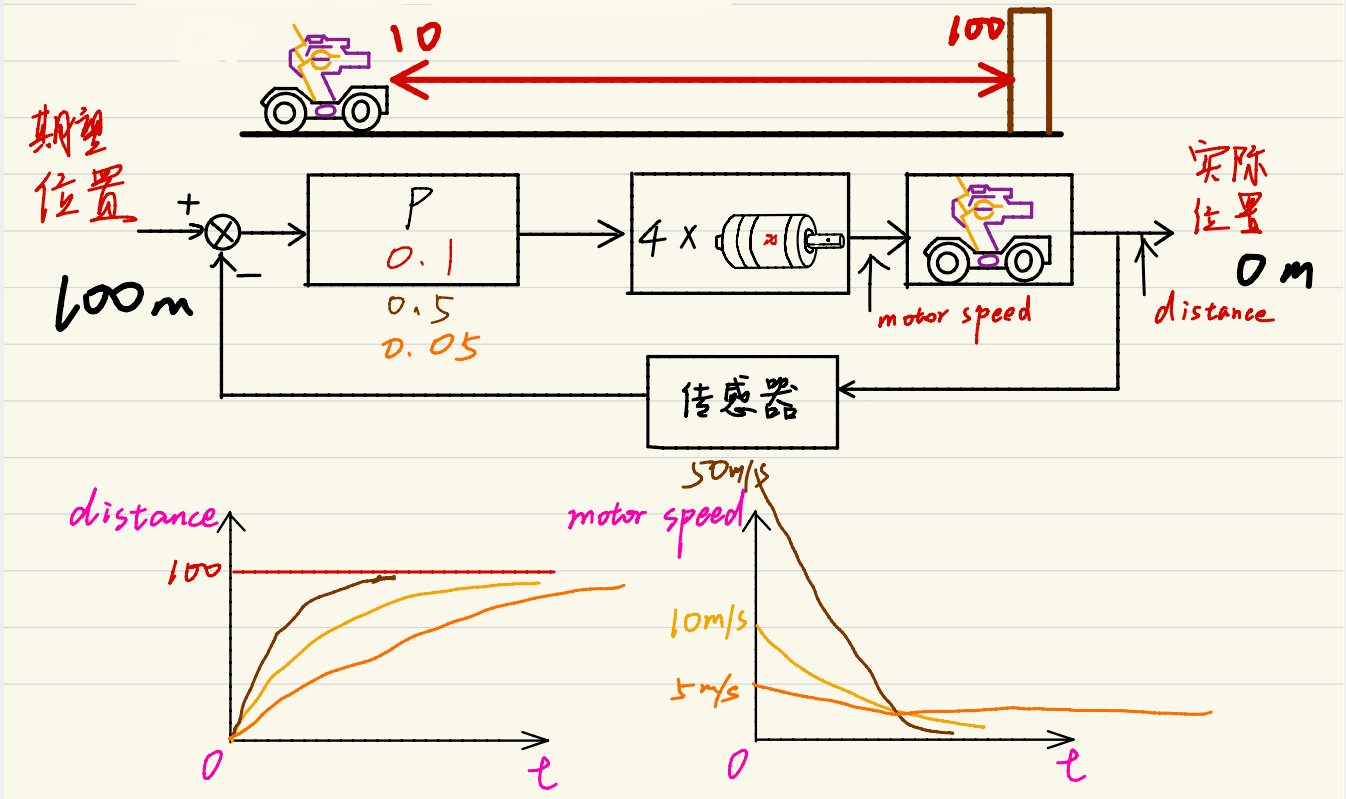
1)单P控制
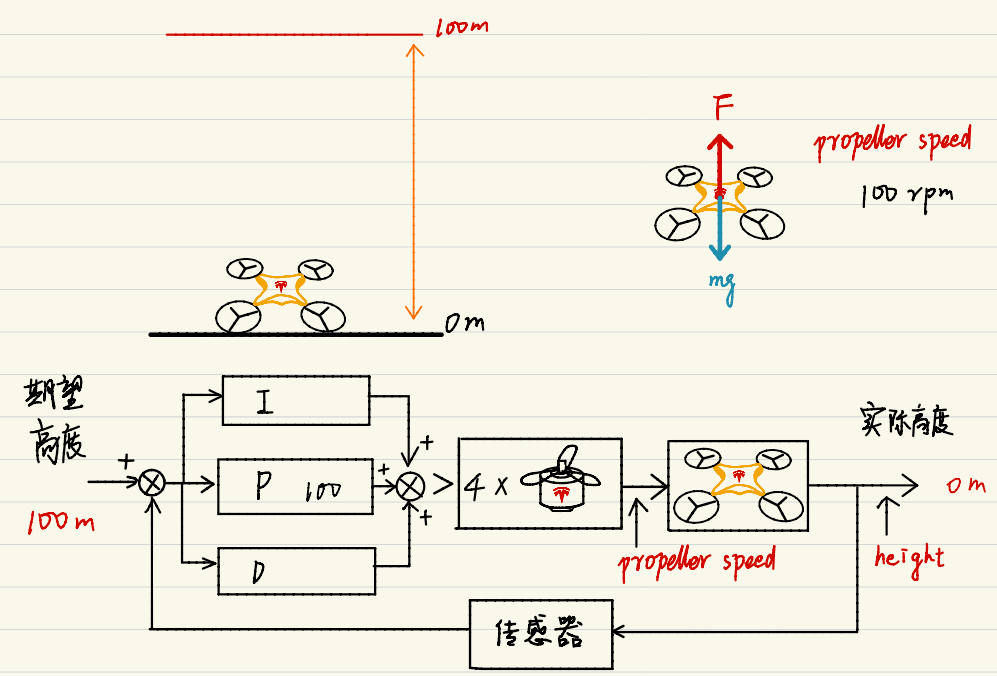
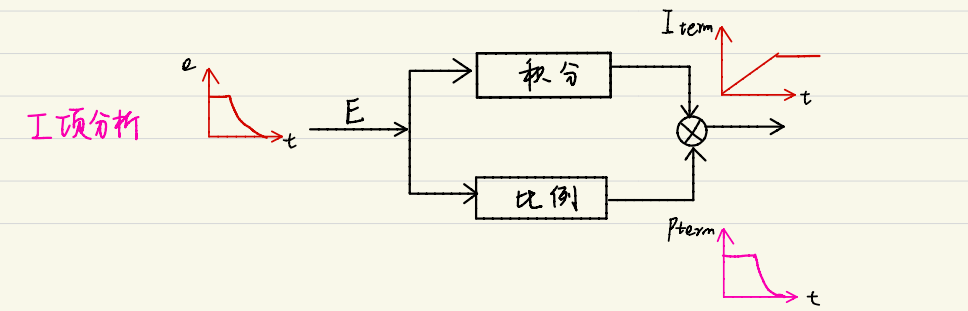
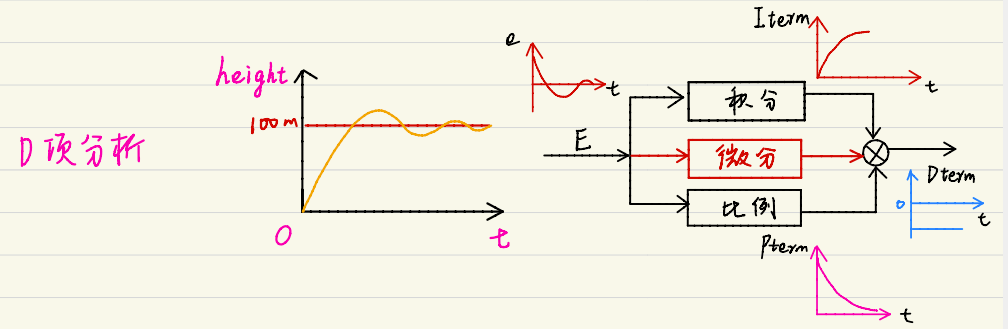
2)PID控制

3、其余相关知识
1)积分限幅
对于积分的最大值进行限制

2)积分分离
对于误差的范围进行限制,超出范围不进行积分
3)微分先行
消除期望高度突变的影响
